|
|
| |
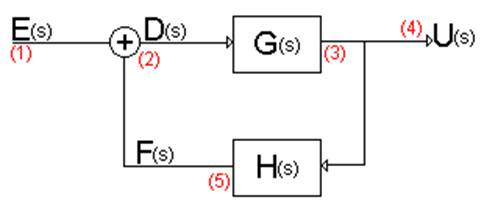
Lo schema che segue è quello di un sistema bilanciato (molto semplificato). Questo sistema è detto "bilanciato" poichè annulla le interferenze elettromagnetiche che possono fra variare i valori di uscita di G(s).
Il sistema ha una funzione d'ingresso o input [E(s)], una funzione di uscita o output [U(s)], e una funzione di trasferimento che è rappresentata dai componenti (2), (3) 949e42j e (5), che sono, rispettivamente:
Nodo sommatore algebrico
Sistema vero e proprio
Controllore
Il sistema quì rappresentato è un sistema deterministico (cioè che ad un determinato ingresso produce un'uscita sempre uguale, indipendentemente da tempo e luogo).
Schema 1
La funzione di trasferimento viene calcola come il rapporto tra la funzione in uscita U(s) e quella d'ingresso E(s).
Ipotizzando il sistema eliminando la parte del controllore (quindi togliendo i punti (2) e (5) dallo schema 1) è possibile identificare la FDT (funzione di trasferimento) come G(s).
Poichè il sistema preso in esame è un sistema bilanciato, la FDT va ricavata dal seguente sistema di tre equazioni:
![]()
F(s) = H(s) . U(s)
D(s) = E(s) - F(s)
U(s) = G(s) . D(s)
Da cui
FDT = U(s) / E(s) = [G(s) . D(s)] / [D(s)+ F(s)]
FDT = [G(s) . D(s)] / [D(s)+ (H(s) . U(s))]
FDT = [G(s) . D(s)] / [D(s)+ (H(s) . G(s) . D(s))]
![]()
![]() FDT = [G(s) . D(s)]
/ [D(s) . (1 + H(s) . G(s))]
FDT = [G(s) . D(s)]
/ [D(s) . (1 + H(s) . G(s))]
![]()
FDT = G(s) / [1+ H(s) . G(s)]
Questa è la funzione di trasferimento FDT generica in questo tipo di sistema.
È possibile notare che a fianco di ogni funzione sono presenti due parentesi che racchiudono una "S". La "S" sta ad indicare che tutte le funzioni sono state trasformate dal dominio del tempo a quello complesso tramite la trasformata di Laplace. Così facendo, è possibile trasformare un'equazione integro-differenziale in somme e differenze.
S = s iw (in ambito pratico, solitamente s è molto piccolo, quindi trascurabile).
Per poter rappresentare graficamente un numero nel tempo, si posiziona il valore del tempo sull'asse delle ascisse e il valore del numero sull'asse delle ordinate; mentre, per rappresentare un numero complesso, sulle ascisse si posizionano i valore della parte reale, e sulle ordinate il valore della parte immaginaria, cioè come segue:
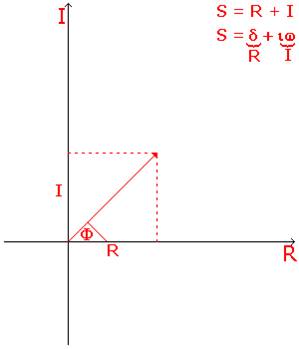
Dal grafico si evince che:
Il modulo del numero nel dominio "S" (calcolato con teorema di Pitagora), vale:
![]()
![]() |c|
= R2 + I2
|c|
= R2 + I2
Invece la fase, cioè l'angolo con cui varia quel numero vale:
j = arctan (I / R)
Rappresentando graficamente una funzione nel dominio complesso, questa possiede quindi un modulo e una fase determinati dalle formule precedenti.
Il problema che nasce nella rappresentazione di funzione con questi criteri, è quello dell'enorme quantità di dati da rappresentare. Per risolvere questo problema si cerca di "comprimere" il grafico utilizzando le funzioni logaritmiche e "l'amplificazione Decibel".
L'amplificazione Decibel consiste in questo:
A|dB = 20log A
Con A si intende una parte della funzione di una generica funzione di trasferimento. Se, per esempio, si ha una funzione di trasferimento
FdT = G(s) = (1 + St) / S(1+ST), applicando le proprietà dei logaritmi e dell'amplificazione decibel, si ottiene
20 log [(1 + S)] / S(1+ST)]
Utilizzando poi le proprietà dei logaritmi, secondo cui il logaritmo di un quoziente è uguale alla differenza del logaritmo del dividendo e il logaritmo del divisore, la formula sopra scritta diventa allora
G(s) = 20 log |1 + S| - 20 log [S(1+ST)]
Sempre utilizzando le proprietà dei logaritmi, secondo cui il logaritmo di un prodotto è uguale alla somma dei logaritmi dei singoli fattori, si semplifica ancora la funzione, quindi
G(s) = 20 log |1 + S| - 20 log |S| + 20 log |1+ST|
![]()
![]()
![]() A B C
A B C
Quì si possono identificare 20 log |1 + S| come A, e gli altri due come B e C. La funzione deve essere in modulo poichè il campo di esistenza della funzione logaritmo è per x>0.
Quindi, A|dB = 20 log |1 + S|. Questa è la funzione che verrà visualizzata graficamente sui grafici di Bode.
I grafici di Bode sono grafici semi-logaritmici, sono di due tipi: modulo e fase.
![]()
![]()
![]()
![]() Ricordando che |c|= R2 + I2 allora A|dB = 20 log 1 + T2 (con T = wt
Ricordando che |c|= R2 + I2 allora A|dB = 20 log 1 + T2 (con T = wt
Risolvendo si ha che
Secondo questa formula, la funzione sarà poi rappresentata sul grafico dei moduli.
Il valore 10 è una costante, indica la pendenza della retta; il valore è sempre una costante, ma il suo reciproco indica il punto di partenza di quella retta. È possibile rappresentare la funzione nel seguente modo:
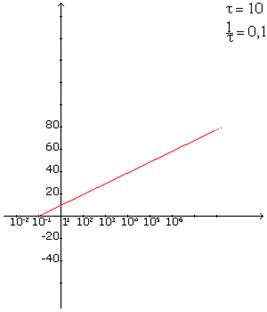
Grafico 2
La retta ottenuta ha pendenza +10 dB / Dec, e taglia l'asse x nel punto 0,1.
Con lo stesso criterio vengono rappresentate tutte le rette che compongono la funzione, e ricordando che quando sono a denominatore la pendenza è negativa e la retta risultante è la somma algebrica delle pendenze, come nel grafico che segue:
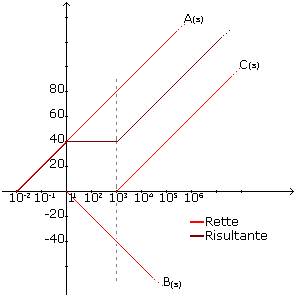
Grafico 3
Prendendo una funzione qualsiasi:
G (wt = (1 + iwt iw wt
Il numeratore della funzione è espresso come j = arctan (wt
La prima parte del denominatore è: j= - arctan (iw
La seconda parte del denominatore è: j= - arctan (wt
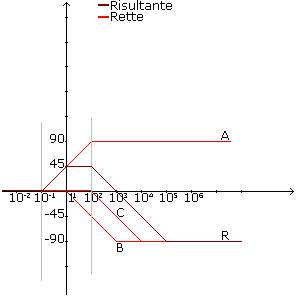
Poichè w è legato alla frequenza (w pf), è possibile trovare l'intervallo di valori che la funzione può assumere, dando poi alla frequenza tutti i valori da 0 a
Se f = 0, arctan (wt /1) = 0
Se f = , arctan (wt /1) = 90°
La fase oscilla quindi tra 0 e 90°.
Nella realtà le rette rappresentate nel seguente grafico sono delle curve che hanno un certo margine di errore.
|
Privacy |
Articolo informazione
Commentare questo articolo:Non sei registratoDevi essere registrato per commentare ISCRIVITI |
Copiare il codice nella pagina web del tuo sito. |
Copyright InfTub.com 2026